




当前位置:首页 > bob88综合在线最新
谷歌母公司 Alphabet 旗下机器人部门BostonDynamics发布了一款集轮子和腿为一体的最新机器人产品 Handle,这款机器人兼具了轮式机器人和腿式机器人的优势。
BostonDynamics是一家研制开发动力机器人及人类模拟仿真软件的工程公司。公司最初分支于麻省理工学院,后来Marc Raibert教授带领着他的几个同事离开麻省理工学院创办波士顿动力。
不过成立之初,波士顿动力是一家软件公司,他们在做DI-Guy的仿真软件。
BostonDynamics一直与美国国防高级研究计划局、美国陆军、海军和海军陆战队有合作,并接受DARPA的资助,产出的机器人在军事领域有着重要的作用。
Handle机器人高约1.98米,重82 kg ,行进速度为每小时14公里,垂直跳跃高度可达1.2米,一次充电的续航能力约为24公里。
Handle是双足人形机器人,专为户外和室内应用设计,整个机器人有10个驱动关节,由电力驱动和液压制动。整个身体与腿之间靠安装在四肢上面的传感器来保持平衡,这些传感器能够识别障碍物上面的QR的编码,并依靠头部上面的激光雷达和立体传感器来进行避障及导航。

Handle有着极强的稳定性,除了能轻松上下台阶行走,Handle通过传感器能感知自己遇到障碍的情况,从而进行俯身跳起动作跨过障碍物。另外Handle还能够直接进行货物搬运,并且搬运途中仍旧保持着极强的平衡感。
BostonDynamics称,“Handle是一款“研发机器人,虽然能执行大量实用性任务,如携带45公斤的重物,但短期内可能不会商用。”
Handle虽然展示了双足机器人优秀的平衡能力,但总有一些极端情况会让它失去平衡。

而波士顿动力创始人莱伯特(Marc Raibert)表示称:“当他的队伍开发一个四足机器人BigDog时,就开始思考怎样保护一个即将摔落的机器人。最初的想法是当检测摔倒时,让机器人的四肢失灵,当四肢碰到地面时,四肢如同长的杠杆,力量会直接作用在连接处。我们的确摔坏过BigDog的一些腿,所以我们重新对BigDog编程。当出现摔倒时,就松动它四肢的连接处。我们现在做的机器人都会检测当他们失去平衡时,对应做出什么反应”。
在去年DARPA机器人挑战赛事里,参赛团队的机器人面临的最大难题是让自己保持直立,即便是造价高达上百美元的机器人在通过障碍物时由于平衡能力不够会导致粉身碎骨,仪器、电机和其他部件造成了严重损坏。

值得注意的一点是,在众多的参数队伍中,来自WPI-CMU的阿特拉斯机器人Warner是诸多Atlas中唯一一个没有摔倒或需要重启的机器人。在决赛的两次尝试中,他们都成功走到最后,拿下八分中的七分。这样优异表现的背后,是CMU机器人学院Christopher Atkeson教授组对稳定步态的研究成果。
伍斯特理工学院的Matt DeDonato指出:“大多数的(机器人挑战赛)参与者,都会关注机器人保持直立而不是关注找出更好的摔倒方式,尤其是当每次摔倒,都会有大量的时间惩罚”。
而佐治亚理工学院研究者们从人类摔倒的行为中总结出一种算法,让一个不平衡的机器人找出一个合适的扭动角度来保持平衡,轮式采用更能减小与地面的碰撞力。为了驱散摔倒的动力,这种算法会计算出机器人摔倒与地面产生的一系列接触点。他们用一个小的人形机器人BioloidGP来测试算法,用Atlas来模拟实战。
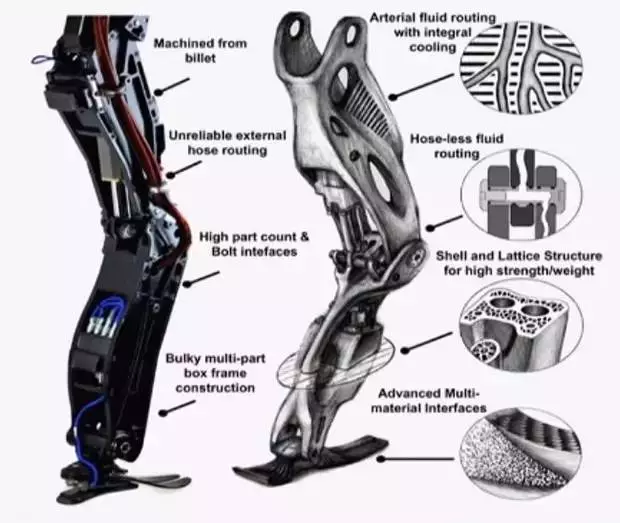
不过在Handle机器人之前,BostonDynamics公司还发布一款名为“Atlas”的机器人,从上次公布的视频来看,他们已在着手解决机器人稳定性不强的问题了,未解决这个问题,他们设想将机器人的脚采用3D 打印,将所有的液压元件直接打印到其结构中。同时增加动脉血管、骨架等仿生物。
不过这些机器人在未来发展中都将会向服务型机器人转变,在我国2015年服务机器人市场规模大约在82亿元左右,2016年增长至140亿元左右,而在今年很可能突破200亿元。
以下为IEEE Spectrum对波士顿动力创始人莱伯特进行的简短采访:
莱伯特:把轮子和腿结合起来打造一款机器人,我们很早就有这种想法了,只不过之前一直没机会来研究。直至去年夏天,我们才有机会来开发这种机器人,大概用了6个月时间。个人会使用了之前为Atlas机器人设计的能源、手臂和上半身,因此项目进展很快。
问:在之前的腿式机器人中,你们成功运用了仿生控制策略。在研发Handle时,是否也使用了这一策略?
莱伯特:Handle用到的控制,许多都得益于我们之前在两足和四足机器人上所取得的经验。虽软软件不完全一样,但平衡和动力学控制原理有许多共同之处,都基于同样的物理学原理。
问:Handle的上半身使用的是Atlas的躯干,还是一个全新的设计?它是电动的,还是液压驱动?
莱伯特:是的,它使用的是Atlas的躯干。手臂也是Atlas的,只不过进行了略微修改。驱动方面,个人会使用电力驱动(电池),但电动和液压驱动技术都用上了。
问:长期以来,你们一直研发腿式机器人。而这次换成轮式机器人,你们是怎么想的?
莱伯特:轮子是一个伟大的发明,但轮子只能在平坦的地面上表现良好;而腿则可以去到任何地方。通过将轮子和腿结合,Handle兼具了轮式机器人和腿式机器人的优势。